131 1300 0010
進(jìn)入正題:
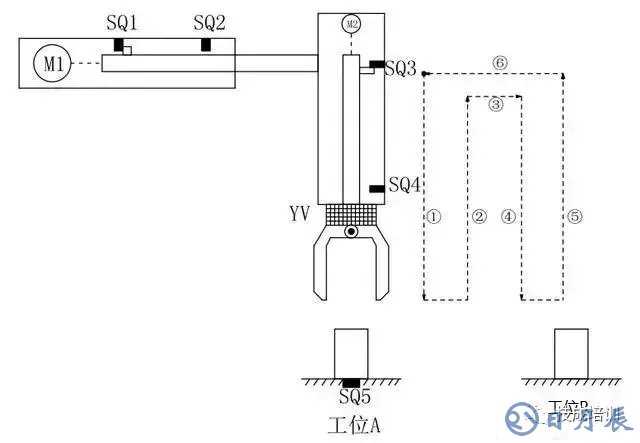
如上圖所示,M1為控制機(jī)械手左右移動的電動機(jī),M2為控制機(jī)械手上下升降的電動機(jī),YV線圈用來控制機(jī)械手夾緊防松,SQ1為左到位檢測開關(guān),SQ2為右到位檢測開關(guān),SQ3為上到位檢測開關(guān),SQ4為下到位檢測開關(guān) ,SQ5為工件檢測開關(guān)。
控制要求如下:
1.機(jī)械手要將工件從工位A移到工位B處;
2.機(jī)械手的初始狀態(tài)(原點條件)是機(jī)械手應(yīng)停在工位A的上方,SQ1、SQ3均閉合;
3.若原點條件滿足且SQ5閉合(工件A處有工件),按下啟動按鈕,機(jī)械手按“原點→下降→夾緊→上升→右移→下降→防松→上升→左移→原點”的步驟工作。
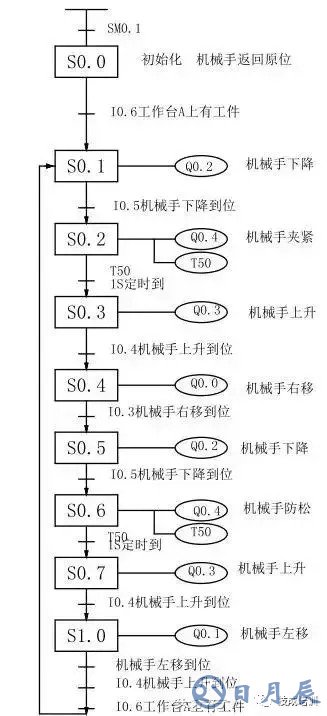
如下圖所示:
編程前理順動作如何轉(zhuǎn)移:
定義符號表:

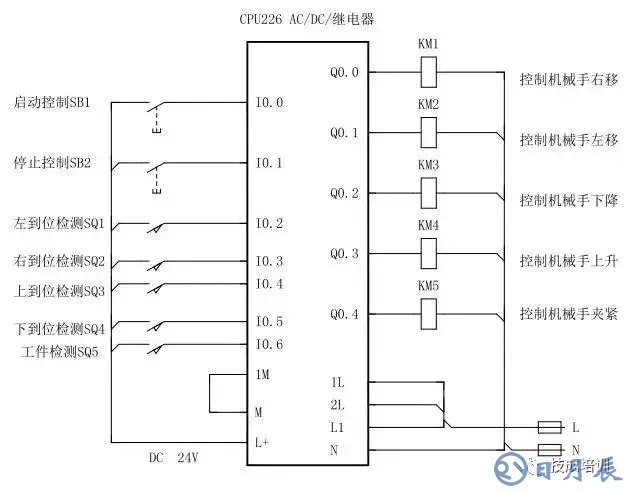
硬件的接線圖:
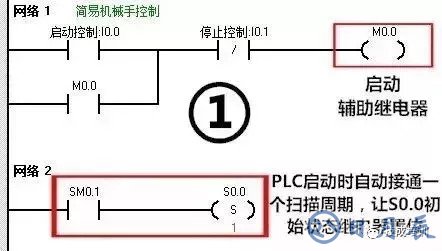
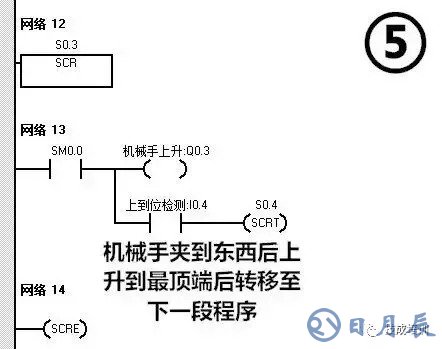
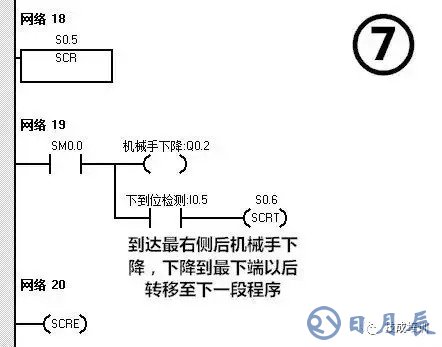
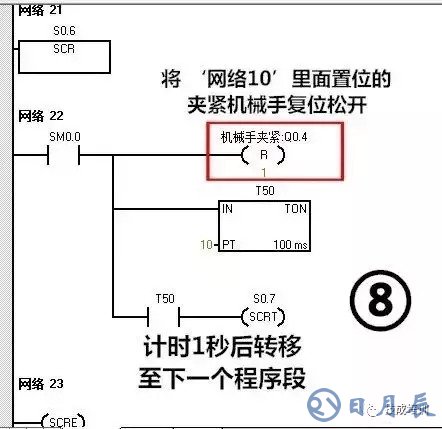
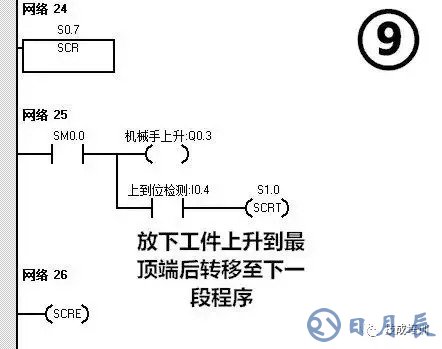
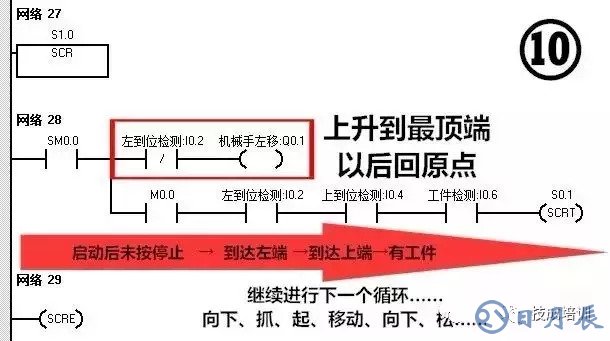
滿足所有動作的程序如下:

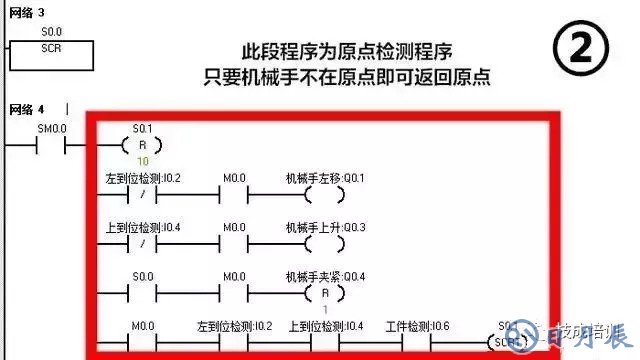
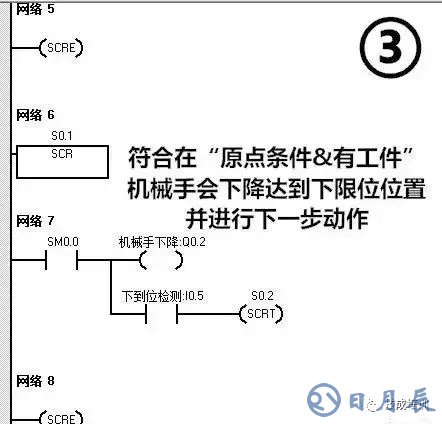
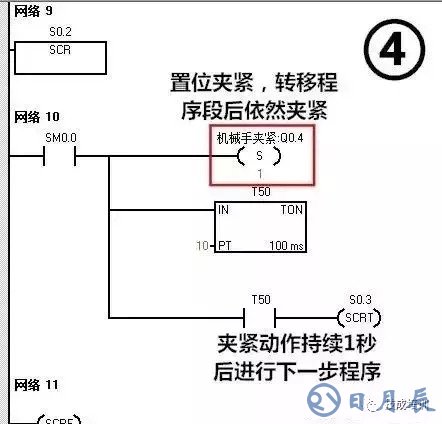
下面我們一段一段分析這個機(jī)械手是如何工作的: