131 1300 0010
1 引言
智能測量在各行各業(yè)已得到廣泛的應(yīng)用,測量所得到的數(shù)據(jù)可以通過串口或經(jīng)外部的 USB 橋接器橋接后經(jīng) USB 口與上位機 交換 數(shù)據(jù)。如果單片機本身已集成了 USB通訊模塊,這將大大降低系統(tǒng)成本,提高系統(tǒng)的可靠性。本系統(tǒng)正是基于此而選用 C8051F34x 芯片,它是SILICon Laboratories 公司最新推出的一款可提供 USB 功能的混合信號微控制器 的高度集成產(chǎn)品[1],包含了高速管線的 8051 兼容微控制器核心,可以在高達(dá) 48 MIPS 的速率下工作,它提供 64 KB 的芯片內(nèi)建閃存以及 5376 字節(jié)的 RAM,其中 70%的指令可以在一個或兩個機器周期中執(zhí)行,并獲得同等級中最佳的 CPU 傳輸率;USB 功能控制器具有完整的 USB 2.0 認(rèn)證,支持全速與低速操作并包含 8 個端點管線;模擬外設(shè)包含一個真正 10位 200 ksps 差分或單端 ADC,可以支持高達(dá) 17 個外部模擬輸入;時序功能可以通過 4 個通用型 16 位定時器或一個 5 通道的可編程計數(shù)器/定時器陣列(PCA)來實現(xiàn),在此有 5 個全功 能端口可以提供 40 個可控制的 I/O 引腳(5 個 8 位口)。
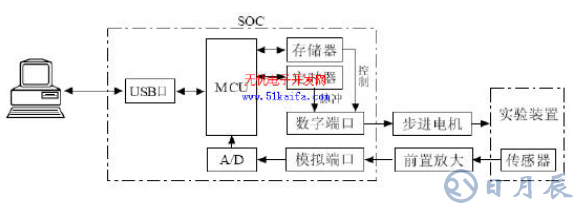
圖 1 系統(tǒng)結(jié)構(gòu)框圖
智能數(shù)據(jù)采集系統(tǒng)包括:步進(jìn)電機控制、數(shù)據(jù)采集、數(shù)據(jù)傳輸、數(shù)據(jù)處理等部分(如圖1 所示)。為了進(jìn)一步提高系統(tǒng)的可靠性和降低成本,本文提出了采用片上系統(tǒng)(SOC)的解決方案——基于C8051F340 的智能測量模塊,該模塊接收上位機的指令來控制步進(jìn)電機的動 作,對傳感器送來的信號進(jìn)行A/D轉(zhuǎn)換,向上位機傳送測量數(shù)據(jù)。
2 模塊的工作原理和功能
智能測量模塊的核心是片上系統(tǒng)(SOC),即 C8051F340 單片機,它具有 USB 通信端口和 A/D 轉(zhuǎn)換模塊。通過應(yīng)用 C8051F340 內(nèi)含的數(shù)字端口實現(xiàn)對步進(jìn)電機的控制,A/D 模塊 對模擬輸入端的信號進(jìn)行數(shù)據(jù)采集,通過芯片中的 USB 端口與上位機進(jìn)行數(shù)據(jù) 交換 。采用C8051F340 單片機后,可以充分利用芯片的內(nèi)部資源,從而節(jié)約系統(tǒng)成本。
2.1 步進(jìn)電機控制功能
步進(jìn)電機的控制量為時鐘脈沖、啟、停和方向控制信號。在實際應(yīng)用中啟、停信號和方 向控制信號相對來說比較簡單,只要向指定的數(shù)字端口輸出高、低電平就能控制步進(jìn)電機的啟動、停止、正向和逆向轉(zhuǎn)動。 步進(jìn)電機所需的時鐘脈沖則要通過對片內(nèi)定時器進(jìn)行編程,使用定時中斷在指定的數(shù)字端口輸出脈沖信號。C8051F340 內(nèi)含的定時器 2 是一個 16 位的計數(shù)器/定時器(見圖 2),由兩個 8 位的 SFR 組成:TMR2L(低字節(jié))和 TMR2H(高字節(jié))。定時器 2 可以工作在 16 位自動 重裝載方式、8 位自動重裝載方式(兩個 8 位定時器)或 USB 幀起始(SOF)捕捉方式。當(dāng)T2SPLIT =“0”且 T2SOF =“0”時,定時器 2 工作在自動重裝載的 16 位定時器方式。
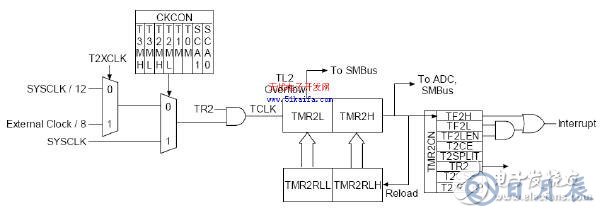
圖 2 定時器 2 的 16 位方式原理圖
定時器 2 可以使用 SYSCLK、SYSCLK/12 或外部振蕩器時鐘/8 作為時鐘源。當(dāng) 16 位定 時器寄存器發(fā)生溢出(從 0xFFFF 到 0x0000)時,定時器 2 重載寄存器(TMR2RLH 和 TMR2RLL) 中的 16 位計數(shù)初值被自動裝入到定時器 2 寄存器對 TMR2H:TMR2L,并將定時器 2 高字節(jié) 溢出標(biāo)志 TF2H 置“1”。如果定時器 2 中斷被允許,每次溢出都將產(chǎn)生中斷。在定時器 2 的中斷服務(wù)程序中,可根據(jù)上位機下達(dá)的指令,對中斷次數(shù)進(jìn)行計數(shù)。當(dāng)中 斷次數(shù)達(dá)到指定數(shù)值時立即改變指定端口的數(shù)值(0 變 1、1 變 0),從而就能在該數(shù)字端口產(chǎn) 生一個指定脈寬的脈沖信號。智能測量模塊采用 C8051F340 片內(nèi)振蕩器(12MHz)產(chǎn)生的 SYSCLK/12 作為定時器的時鐘源,數(shù)字端口設(shè)置為推挽輸出,當(dāng)重載寄存器的值為 0xFF64 時能在數(shù)字端口輸出最高為3205Hz 的方波。由于所選用的芯片是低電壓、低功耗的高速器件,有時還存在著數(shù)字端口與步進(jìn)電機控制電路之間信號電平的匹配問題,為此可選用相應(yīng)的電平轉(zhuǎn)移電路來解決。
2.2 數(shù)據(jù)采集和處理功能
C8051F340 內(nèi)部有一個 10 位 SAR ADC 和一個差分輸入多路選擇器。該 ADC 工作在200ksps 的最大采樣速率時可提供真正 10 位的線性度。ADC 系統(tǒng)包含一個可編程的模擬多 路選擇器,用于選擇 ADC 的正輸入和負(fù)輸入以及測量信號源。A/D 轉(zhuǎn)換可以有 6 種啟動方式:軟件命令、定時器 0 溢出、定時器 1 溢出、定時器 2 溢出、定時器 3 溢出或外部轉(zhuǎn)換啟動信號。這種靈活性允許用軟件事件、周期性信號(定時器溢出)或外部硬件信號觸發(fā)轉(zhuǎn)換。 一個狀態(tài)位用于指示轉(zhuǎn)換完成,或產(chǎn)生中斷(如果被允許)。轉(zhuǎn)換結(jié)束后 10 位結(jié)果數(shù)據(jù)字被鎖存到 ADC 數(shù)據(jù)寄存器,即 ADC0H 和 ADC0L 中(見圖 3)。
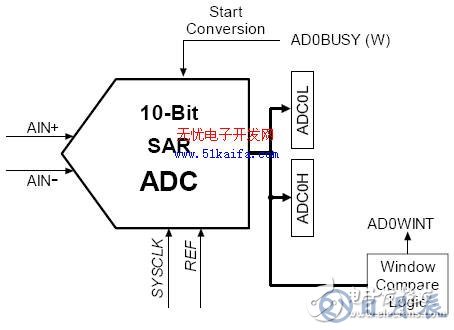
圖3 10位ADC電路圖
智能測量模塊在數(shù)據(jù)采集時,GND 被選擇為負(fù)輸入,則 ADC0 工作在單端方式,轉(zhuǎn)化 碼為 10 位無符號整數(shù),所測量的輸入信號范圍為 0 ~VREF×1023/1024。VREF 為 A/D 轉(zhuǎn)換 時的參考電壓,可用片內(nèi)提供的基準(zhǔn)電壓。轉(zhuǎn)換數(shù)據(jù)在寄存器對 ADC0H:ADC0L 中的 存儲 方式可以是左對齊或右對齊,采用右對齊時測量結(jié)果的數(shù)值范圍為 0 ~0x3FF。向 AD0BUSY 寫“1”方式提供了用軟件控制 ADC0 轉(zhuǎn)換的能力。AD0BUSY 位在轉(zhuǎn)換期間被置“1”,轉(zhuǎn) 換結(jié)束后復(fù)“0”。在定時器 2 的中斷服務(wù)程序中,可根據(jù)步進(jìn)電機的工作模式和上位機的指令,確定步進(jìn) 電機運動多少步后再啟動 A/D (AD0BUSY 寫“1”)——采集數(shù)據(jù),并將數(shù)據(jù)保存在閃存中。 對于被測信號電平有嚴(yán)格的要求,前置放大器的輸出級可用運放 OP07 組成電壓跟隨電路,并在輸出端加裝限壓保護(hù)電路以保證單片機模擬輸入端的 安全 。
2.3 數(shù)據(jù)通信功能
C8051F340 集成了 USB 功能控制器,用于實現(xiàn) USB 接口的外部設(shè)備(C8051F340 不能作 USB 主設(shè)備),USB 功能控制器和收發(fā)器具有完整的 USB 2.0 認(rèn)證,支持全速與低速操作 并包含 8 個端點管線,控制端點(端點 0)總是作為雙向 IN/OUT 端點,其它端點被作為 3 對IN/OUT 端點管線,通信速度可通過特殊功能寄存器 USB0XCN 中的 SPEED 位選擇,要使USB0 工作在全速方式,USB0 的時鐘必須為 48 MHz。當(dāng) USB 接收數(shù)據(jù)時,串行接口引擎SIE)在接收完一個完整的數(shù)據(jù)包后中斷處理器;相應(yīng)的握手信號由 SIE 自動產(chǎn)生。當(dāng)發(fā)送 數(shù)據(jù)時,SIE 在發(fā)送完一個完整的數(shù)據(jù)包并且收到相應(yīng)的握手信號后中斷處理器。智能測量模塊采用 C8051F340 片內(nèi)振蕩器(12MHz)產(chǎn)生的 SYSCLK,經(jīng)內(nèi)置的 4 倍時鐘 乘法器產(chǎn)生 48MHz 時鐘,使 USB0 工作在全速方式。模塊設(shè)置成通過端點 1 向上位機發(fā)送數(shù)據(jù),端點 2 接收上位機送來的數(shù)據(jù),USB 工作在中斷方式。
3 軟件設(shè)計及系統(tǒng) 測試
模塊通訊 協(xié)議 的三層結(jié)構(gòu)模型為:物理層、數(shù)據(jù)鏈路層和應(yīng)用層。物理層和數(shù)據(jù)鏈路層的功能包括各種通訊幀結(jié)構(gòu)的組織和收發(fā), 是由 SOC 本身實現(xiàn)的, 因此系統(tǒng)的開發(fā)將集中在應(yīng)用層軟件的設(shè)計。
固件程序主要包括初始化、主控程序和 3 個中斷服務(wù)程序。模塊初始化部分就是要定義SOC 的工作頻率,定義模擬、數(shù)字端口的輸入/輸出模式,定義 USB 中斷、定時器 2 中斷和A/D 中斷的工作模式;主控程序處理前臺任務(wù),主要是響應(yīng)各類中斷和利用公共數(shù)據(jù)區(qū)進(jìn)行數(shù)據(jù)交換;步進(jìn)電機的控制、數(shù)據(jù)的采集和數(shù)據(jù)的通信都將利用中斷服務(wù)程序在后臺實現(xiàn)。
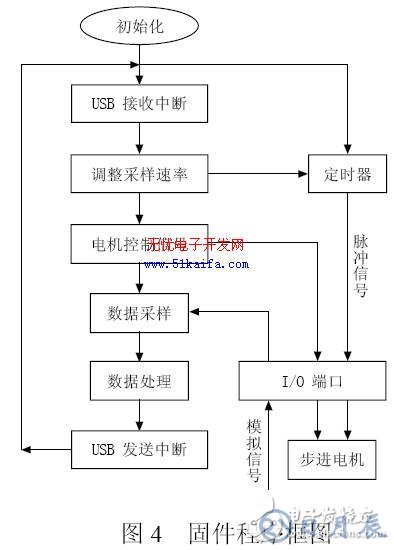
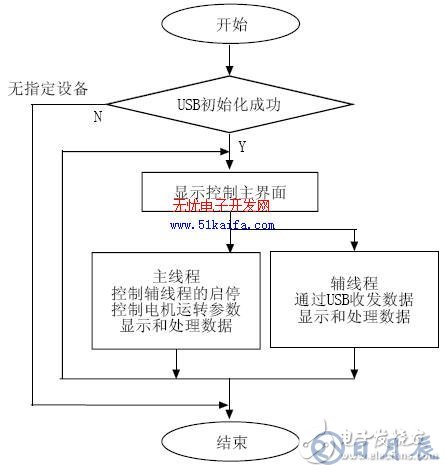
圖 5 上位機程序框圖
上位機程序采用 VC 可視化開發(fā)平臺,對 USB 端口形成的通信管道進(jìn)行標(biāo)準(zhǔn)的讀寫操作,從而實現(xiàn)上位機與 C8051F340 的數(shù)據(jù)通訊,實時顯示現(xiàn)場參數(shù)、繪制圖形,并對現(xiàn)場參數(shù)進(jìn)行系統(tǒng)分析。
上位機程序采用主線程和輔線程協(xié)調(diào)工作模式, 可以降低主程序處理時間, 提高通訊效率。
對圖 1 所示的系統(tǒng)進(jìn)行 測試 :分別對橢圓偏振片、圓偏振片組成的光路進(jìn)行光強分布測試,步進(jìn)電機由 C8051F單片機控制,每秒鐘轉(zhuǎn)一圈測 200 個數(shù)據(jù);PC 機通過 USB 口接收數(shù)據(jù),并對數(shù)據(jù)進(jìn)行分析和擬合,根據(jù)偏振片的不同組合,可得到圓形、橢圓形、腰果形等不同類型的圖形。
4 結(jié)束語
論文提出的基于 C8051F340 的智能測量系統(tǒng)由于采用小體積貼裝芯片,不必外接其它A/D轉(zhuǎn)換和 USB 通信接口器件,減小了整機的體積,提高了整機的性價比和可靠性。測試表明,該模塊在實際檢測過程中能夠準(zhǔn)確的提取被測對象的信號特征,各項指標(biāo)都符合測試要求。
本文作者創(chuàng)新點:采用SILICon Laboratories 公司最新推出的一款微控制器 C8051F340 為 智能測量系統(tǒng)的核心,因其可提供 USB 功能,集測量控制、數(shù)據(jù)采集、數(shù)據(jù)通訊為一體,便于軟件開發(fā),并減小了整機的體積,提高了整機的性價比和可靠性。

